Questions de théorie
Ces questions sont destinées à vous faire revoir la théorie de ce chapitre.
Définissez repère et repère orthonormé dans le plan.
La définition se trouve dans le chapitre 8, section 4.1.
Un repère dans le plan est la donnée d'une origine $O$ et de deux vecteurs $\vec{e_1}$ et $\vec{e_2}$ non parallèles. Un tel repère sera noté $[O; \vec{e_1}, \vec{e_2}]$.
Le repère $[O; \vec{e_1}, \vec{e_2}]$ est orthonormé si les vecteurs $\vec{e_1}$ et $\vec{e_2}$ sont perpendiculaires et de longueur $1$.
Pourquoi les vecteurs $(1,0)$ et $(0,1)$ sont-ils appelés vecteurs de base ?
La définition se trouve dans le chapitre 8, section 4.1.
Les vecteurs $(1,0)$ et $(0,1)$ sont appelés vecteurs de base car on peut écrire n'importe quel autre vecteur comme combinaison linéaire de ces deux vecteurs : $$\vec{v}=(v_x,v_y)=v_x(1,0)+v_y(0,1).$$
Définissez repère et repère orthonormé dans l'espace.
La définition se trouve dans le chapitre 8, section 4.2.
Un repère dans l'espace est la donnée d'une origine $O$ et de trois vecteurs $\vec{e_1}$, $\vec{e_2}$ et $\vec{e_3}$ non coplanaires. Un tel repère sera noté $[O; \vec{e_1}, \vec{e_2}, \vec{e_3}]$.
Le repère $[O; \vec{e_1}, \vec{e_2}, \vec{e_3}]$ est orthonormé si les vecteurs $\vec{e_1}$, $\vec{e_2}$ et $\vec{e_3}$ sont orthogonaux deux à deux et de longueur $1$.
Pourquoi les vecteurs $(1,0, 0)$, $(0,1,0)$ et $(0,0,1)$ sont-ils appelés vecteurs de base ?
La définition se trouve dans le chapitre 8, section 4.1.
Les vecteurs $(1,0,0)$, $(0,1,0)$ et $(0,0,1)$ sont appelés vecteurs de base car on peut écrire n'importe quel autre vecteur comme combinaison linéaire de ces trois vecteurs : $$\vec{v}=(v_x,v_y,v_z)=v_x(1,0,0)+v_y(0,1,0)+v_z(0,0,1).$$
Quelle est l'utilité de faire un changement de repère ?
L'explication se trouve dans le chapitre 8, section 4.3.
Une surface donnée peut se trouver décrite par une équation compliquée si on travaille par rapport à un repère donné alors que par rapport à un repère mieux choisi elle serait décrite par une équation nettement plus simple.
Faire un changement de repère permet donc de simplifier les équations avec lesquelles on travaille.
Donnez deux types de changements de repères.
L'explication se trouve dans le chapitre 8, section 4.3.
Le changement de repère par translation consiste à translater l'origine du repère sans changer l'orientation des axes. Ce type de changement de repère permet de supprimer les termes du premier degré d'une équation.
Le changement de repère par rotation consiste à faire tourner le repère autour d'un de ses axes. Ce type de changement de repère permet de supprimer les termes "mixtes" ($xy$, $xz$ et $yz$) d'une équation.
Expliquez le changement de repère par translation.
L'explication se trouve dans le chapitre 8, section 4.3.
Dans le changement de repère par translation, on change l'origine, mais on garde la même base pour l'espace des flèches.
Soit $[0; \vec e_1,\vec e_2,\vec e_3]$ le 1er repère et $O'$ la nouvelle origine, avec comme coordonnées $(x_0,y_0,z_0)$ dans le repère initial.
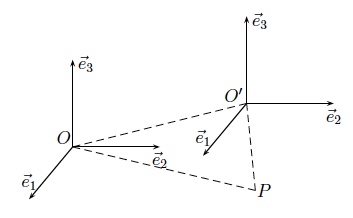
Soit alors $P$ un point quelconque de coordonnées $(x,y,z)$ dans le 1er repère et $(x',y',z')$ dans le second. On a $$\overrightarrow{OP} = \overrightarrow{OO'}+ \overrightarrow{O'P}.$$ En termes de coordonnées, cela donne $$ \left\{ \begin{array}{l} x = x_0 + x' \\ y = y_0 + y' \\ z = z_0 + z' \end{array} \right. $$
Ces formules permettent de passer facilement d'un repère à l'autre.
Expliquez le changement de repère par rotation.
L'explication se trouve dans le chapitre 8, section 4.3.
Dans le changement de repère par rotation, on garde la même origine mais on fait tourner le repère autour d'un axe de coordonnées.
Soit $OABC$ un repère cartésien orthonormé. Faisons par exemple une rotation d'amplitude $\alpha$ dans le sens antihorlogique autour de $OA$.
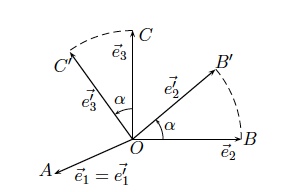
On a facilement l'expression de la nouvelle base en fonction de l'ancienne : $$ \begin{array}{rcl} \vec e'_1& =& \vec e_1\\ \vec e'_2 &=& 0 \, \vec e_1 + (\cos \alpha) \, \vec e_2 + (\sin \alpha)\, \vec e_3 \\ \vec e'_3 &=& 0 \, \vec e_1 + (- \sin \alpha)\, \vec e_2 + (\cos \alpha)\, \vec e_3 \end{array} $$
d'où $$ \left\{ \begin{array}{l} x = x' \\ y =(\cos \alpha)\, y' - (\sin \alpha)\, z' \\ z = (\sin \alpha)\, y' + (\cos \alpha)\, z' \end{array} \right. $$
Donnez les équations de changement de repère par rotation du repère d'un angle $\alpha$ autour de l'axe $OX$.
1 - Exprimez les coordonnées des vecteurs $\vec e_1'$, $\vec e_2'$ et $\vec e_3'$ dans le repère initial.
2 - Exprimez ensuite les coordonnées d'un point quelconque $P$ dans les deux repères.
3 - Injectez l'étape 1 dans l'étape 2.
On a $$ \begin{array}{rcl} \vec{e'_1}& =& \vec e_1\\[2mm] \vec{e'_2} &=& 0 \, \vec e_1 + (\cos \alpha)\, \vec e_2 + (\sin \alpha)\, \vec e_3 \\[2mm] \vec{e'_3} &=& 0 \, \vec e_1 + (- \sin \alpha)\, \vec e_2 + (\cos \alpha)\, \vec e_3 \end{array} $$
Donc $$ \left\{ \begin{array}{rcl} \vec{e'_1}& =& \vec e_1\\[2mm] \vec{e'_2} &=& \cos \alpha\, \vec e_2 + \sin \alpha\, \vec e_3 \\[2mm] \vec{e'_3} &=&- \sin \alpha\, \vec e_2 + \cos \alpha\, \vec e_3 \end{array} \right. $$
Dans le repère initial $\mathcal{R}$ : $P=(x,y,z)$ c'est-à-dire $\overrightarrow{OP}=x\vec e_1+y\vec e_2+z\vec e_3$.
Dans le nouveau repère $\mathcal{R'}$ : $P=(x',y',z')$ c'est-à-dire $\overrightarrow{OP}=x'\vec{e'_1}+y'\vec{e'_2}+z'\vec{e'_3} $.
Donc $$ \begin{array}{rcl} x\vec e_1+y\vec e_2+z\vec e_3&=&x'\vec{e'_1}+y'\vec{e'_2}+z'\vec{e'_3}\\[2mm] &=&x'\vec{e_1}+y'(\cos \alpha\, \vec e_2 + \sin \alpha\, \vec e_3)+z'(- \sin \alpha\, \vec e_2 + \cos \alpha\, \vec e_3)\\[2mm] &=&x'\vec{e_1}+(y'\cos \alpha-z'\sin \alpha)\, \vec e_2+(y'\sin \alpha+z'\cos \alpha)\, \vec e_3 \end{array} $$
Passage de $\mathcal{R'}$ vers $\mathcal{R}$ :
$$ \left\{ \begin{array}{l} x =x' \\ y = y'\cos \alpha-z'\sin \alpha\\ z = y'\sin \alpha+z'\cos \alpha\end{array} \right. $$
Donnez les équations de changement de repère par rotation du repère d'un angle $\alpha$ autour de l'axe $OY$.
1 - Exprimez les coordonnées des vecteurs $\vec e_1'$, $\vec e_2'$ et $\vec e_3'$ dans le repère initial.
2 - Exprimez ensuite les coordonnées d'un point quelconque $P$ dans les deux repères.
3 - Injectez l'étape 1 dans l'étape 2.
On a $$ \begin{array}{rcl} \vec{e'_1}& =&(\cos \alpha)\, \vec e_1+0 \, \vec e_2 + (- \sin \alpha)\, \vec e_3 \\[2mm] \vec{e'_2} &=&\vec e_2\\[2mm] \vec{e'_3} &=& (\sin \alpha)\, \vec e_1 + 0 \, \vec e_2 +(\cos \alpha)\, \vec e_3 \end{array} $$
Donc $$ \left\{ \begin{array}{rcl} \vec{e'_1}& =&\cos \alpha\, \vec e_1- \sin \alpha\, \vec e_3 \\[2mm] \vec{e'_2} &=&\vec e_2\\[2mm] \vec{e'_3} &=& \sin \alpha\, \vec e_1 + \cos \alpha\, \vec e_3\end{array} \right. $$
Dans le repère initial $\mathcal{R}$ : $P=(x,y,z)$ c'est-à-dire $\overrightarrow{OP}=x\vec e_1+y\vec e_2+z\vec e_3$.
Dans le nouveau repère $\mathcal{R'}$ : $P=(x',y',z')$ c'est-à-dire $\overrightarrow{OP}=x'\vec{e'_1}+y'\vec{e'_2}+z'\vec{e'_3} $.
Donc $$ \begin{array}{rcl} x\vec e_1+y\vec e_2+z\vec e_3&=&x'\vec{e'_1}+y'\vec{e'_2}+z'\vec{e'_3}\\[2mm] &=&x'(\cos \alpha\, \vec e_1- \sin \alpha\, \vec e_3)+y'\vec e_2+z'(\sin \alpha\, \vec e_1 + \cos \alpha\, \vec e_3)\\[2mm] &=&(x'\cos \alpha+z'\sin \alpha)\, \vec e_1+y'\, \vec e_2+(-x'\sin \alpha+z'\cos \alpha)\, \vec e_3 \end{array} $$
Passage de $\mathcal{R'}$ vers $\mathcal{R}$ :
$$ \left\{ \begin{array}{l} x =x'\cos \alpha+z'\sin \alpha \\ y = y'\\ z = -x'\sin \alpha+z'\cos \alpha\end{array} \right. $$
Donnez les équations de changement de repère par rotation du repère d'un angle $\alpha$ autour de l'axe $OZ$.
1 - Exprimez les coordonnées des vecteurs $\vec e_1'$, $\vec e_2'$ et $\vec e_3'$ dans le repère initial.
2 - Exprimez ensuite les coordonnées d'un point quelconque $P$ dans les deux repères.
3 - Injectez l'étape 1 dans l'étape 2.
On a $$ \begin{array}{rcl} \vec{e'_1}& =&(\cos \alpha)\, \vec e_1 + (\sin \alpha)\, \vec e_2+0 \, \vec e_3\\[2mm] \vec{e'_2} &=& (- \sin \alpha)\, \vec e_1+ (\cos \alpha)\, \vec e_2 +0 \, \vec e_3 \\[2mm] \vec{e'_3} &=&\vec e_3 \end{array} $$
Donc $$ \left\{ \begin{array}{rcl} \vec{e'_1}& =&\cos \alpha\, \vec e_1 + \sin \alpha\, \vec e_2\\[2mm] \vec{e'_2} &=& - \sin \alpha\, \vec e_1+ \cos \alpha\, \vec e_2 \\[2mm] \vec{e'_3} &=&\vec e_3 \end{array} \right. $$
Dans le repère initial $\mathcal{R}$ : $P=(x,y,z)$ c'est-à-dire $\overrightarrow{OP}=x\vec e_1+y\vec e_2+z\vec e_3$.
Dans le nouveau repère $\mathcal{R'}$ : $P=(x',y',z')$ c'est-à-dire $\overrightarrow{OP}=x'\vec{e'_1}+y'\vec{e'_2}+z'\vec{e'_3} $.
Donc $$ \begin{array}{rcl} x\vec e_1+y\vec e_2+z\vec e_3&=&x'\vec{e'_1}+y'\vec{e'_2}+z'\vec{e'_3}\\[2mm] &=&x'(\cos \alpha\, \vec e_1 + \sin \alpha\, \vec e_2)+y'(- \sin \alpha\, \vec e_1+ \cos \alpha\, \vec e_2)+z'\, \vec e_3\\[2mm] &=&(x'\cos \alpha-y' \sin \alpha)\, \vec{e_1}+(x'\sin \alpha+y'\cos \alpha)\, \vec e_2+z'\, \vec e_3 \end{array} $$
Passage de $\mathcal{R'}$ vers $\mathcal{R}$ :
$$ \left\{ \begin{array}{l} x =x'\cos \alpha-y' \sin \alpha \\ y = x'\sin \alpha+y'\cos \alpha\\ z =z'\end{array} \right. $$